Nat Dilokthanakul
About
Nat Dilokthanakul is a lecturer at the school of information technology, King Mongkut's Institute of Technology Ladkrabang. He received the M.Sc. degree in physics from University College London, London, U.K., in 2014, and the Ph.D. degree in computing from Imperial College London, London, U.K., in 2019. During 2019-2022, he had been a postdoctoral researcher with the School of Information Science and Technology, Vidyasirimedhi Institute of Science and Technology (VISTEC), Rayong, Thailand. The goal of his research is to endow robots with the cognitive ability required for the uncontrolled real world. His research interests include representation learning, deep reinforcement learning, agent-based learning, model-based control and simultaneous localization and mapping (SLAM) system.
Projects
Collaborative Agents
In this project, our goal is to develop novel learning and meta-learning algorithms that allow the agents to collaborate well with other agents.
Human-Machine Collaboration and Communication
A better human-AI interface will make it much easier to operate a robot in complex tasks.
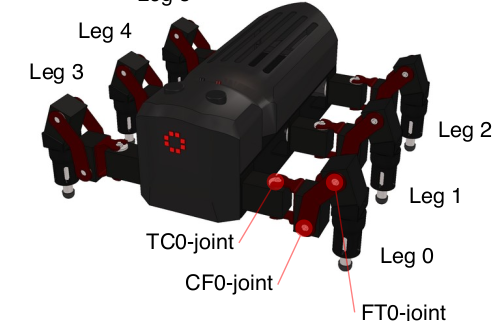
Adaptive Locomotion Control
A robot with a robust locomotion controller can operate in unforgiving domains by adapting its behaviours. Is there a generic and simple adaptivity rule that enable such behaviours?

Visual Representation Learning, Navigation and Manipulation
Navigation and Manipulation require high-level cognitive abilities. What is the best representation for these kind of reasoning tasks?